- Reduced price

Banner


Ths is an Infra-Red thermometer for non-contact temperature measurements. Both the IR-sensitive thermopile detector chip and the signal conditioning ASIC are integrated into the same TO-39 can. The Integrate sensor is a low noise amplifier, 17-bit ADC, and powerful DSP unit thus achieving high accuracy and resolution of the thermometer. RoboticsBD
The user can configure the digital output to be PWM. As a standard, the 10-bit PWM is configured to continuously transmit the measured temperature in the range of -20 to 120 °C, with an output resolution of 0.14 °C. RoboticsBD.Featured By RoboticsBD.
Product Images are shown for illustrative purposes only and may differ from the actual product.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
| General Specification | |
| Model | Non Brand |
| Operating Voltage(V) | 3- 5 |
| Operating Current(mA) | 2 |
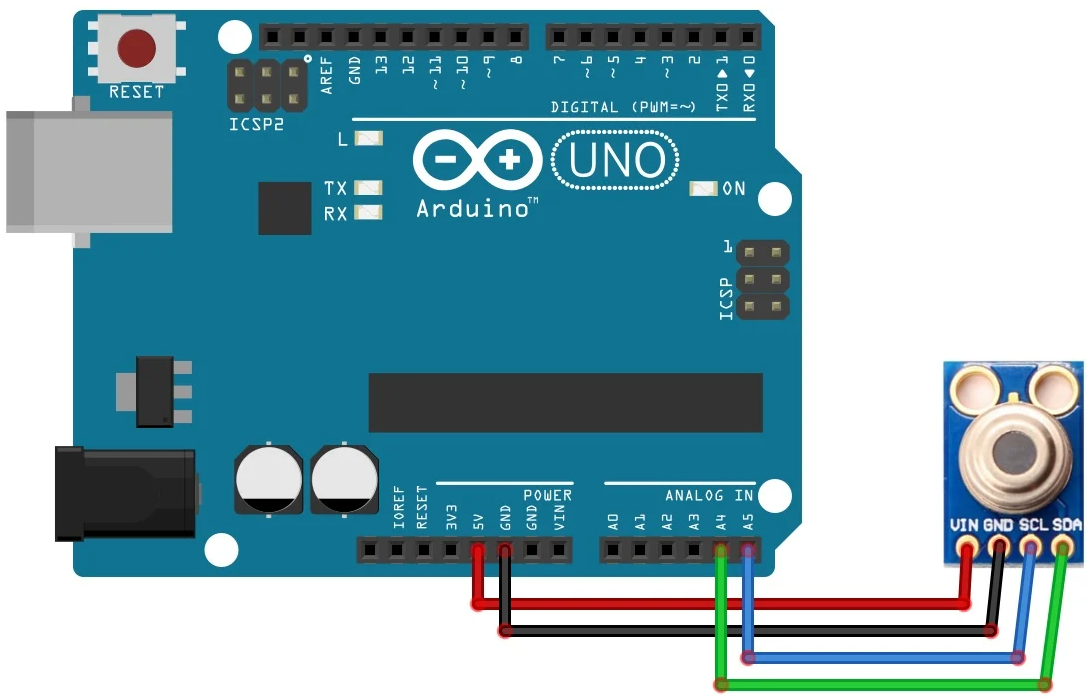
| Communication protocol | I2C |
| Sensor working temperature( Degree C) | -40 to +125 |
| Sensing temperature range(Degree C) | -70 to +380 |
| PCB dimensions(mm) | 11 x 17 |
| Weight(g) | 1 |
| Shipment Weight | 0.01 kg |
| Shipment Dimensions | 8 × 6 × 2 cm |
Please allow 5% measuring deviation due to manual measurement.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
Please use the following sketch to work with our sensor
#include <Wire.h>
constexpr uint8_t I2C_ADDRESS = 0x7f;
constexpr uint8_t CMD_REGISTER = 0x30;
constexpr uint8_t DATA_REGISTER_BASE = 0x10;
constexpr uint8_t POWER_ON_CMD = 0x08;
constexpr uint8_t POWER_OFF_CMD = 0x00;
constexpr float TEMPERATURE_SCALE = 16384.0; // 2^14
void setup() {
Serial.begin(9600);
if (!writeCommand(POWER_OFF_CMD)) {
Serial.println("Error: Failed to reset sensor!");
}
delay(10);
if (!writeCommand(POWER_ON_CMD)) {
Serial.println("Error: Failed to power on sensor!");
}
}
void loop() {
if (!writeCommand(POWER_ON_CMD)) {
Serial.println("Error: Communication failed!");
delay(1000);
return;
}
delay(50);
int32_t rawTemperature = readTemperatureData();
if (rawTemperature != -1) {
float temperature = static_cast<float>(rawTemperature) / TEMPERATURE_SCALE;
Serial.print("Temperature: ");
Serial.print(temperature);
Serial.println(" °C");
} else {
Serial.println("Error: Failed to read temperature data!");
}
delay(200);
}
bool writeCommand(uint8_t command) {
Wire.beginTransmission(I2C_ADDRESS);
Wire.write(CMD_REGISTER);
Wire.write(command);
return (Wire.endTransmission() == 0);
}
int32_t readTemperatureData() {
uint8_t buffer[3] = {0};
for (int i = 0; i < 3; i++) {
Wire.beginTransmission(I2C_ADDRESS);
Wire.write(DATA_REGISTER_BASE + i);
if (Wire.endTransmission() != 0) return -1;
Wire.requestFrom(I2C_ADDRESS, 1);
if (Wire.available()) {
buffer[i] = Wire.read();
} else {
return -1;
}
}
int32_t result =
((int32_t)buffer[0] << 16) |
((int32_t)buffer[1] << 8) |
buffer[2];
if (result & 0x00800000) {
result |= 0xFF000000;
}
return result;
}
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
1 x Contactless Temperature Sensor Module For Arduino
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
Specific References
Your review appreciation cannot be sent
Report comment
Report sent
Your report cannot be sent
Write your review
Review sent
Your review cannot be sent
Reference: RBD-2474
Reference: RBD-4078
We'll slide into your inbox when the product is back in stock.
Reference: RBD-2443
Reference: RBD-2217
Reference: RBD-4194
Brand: Waveshare
Reference: RBD-3780
Reference: RBD-4087
Reference: RBD-2858
Reference: RBD-3821
Reference: RBD-2806
Reference: RBD-3057
Brand: DFRobot
Reference: RBD-3002
Brand: DFRobot
Reference: RBD-0680
Reference: RBD-1196
Reference: RBD-1813
Reference: RBD-0491
Reference: RBD-2303
Reference: RBD-2640
Reference: RBD-0094
Reference: RBD-0133
Reference: RBD-2639
Reference: RBD-0020
Reference: RBD-0376
Reference: RBD-2641
check_circle
check_circle