Inductive proximity sensors are broadly used to detect near by metal objects. In principle such sensors use currents induced by magnetic fields for the detection process, that means their working principle is based on a coil and oscillator that creates an electromagnetic field in the close surroundings of the sensor face. The presence of a metallic object (target) in its close proximity causes a dampening of the oscillation amplitude. The rise (or fall) of such oscillation is identified by a threshold circuit that changes the output of the sensor. The operating distance (proximity range) depends on the target’s shape and size and is strictly linked to the nature of the material. Note that Iron (Fe37) is a good target for inductive proximity sensors as it has “1 x Sn” sensitivity when compared with other metal objects. Usually, the operating distance (Sn) is denoted as the maximum distance (± 10%) from the proximity sensor to a square piece of Iron (Fe 37), 1mm thick with side’s equal to the diameter of the sensing face, that will initiate a change in the output of the proximity sensor. RoboticsBD
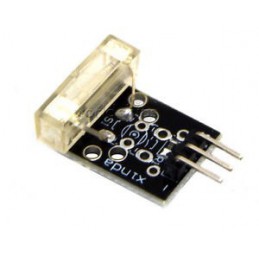
The NJK-5002C Hall-Effect Sensor Proximity Switch is in fact a simple magnetic proximity sensor with one ‘unipolar’ Hall-Effect Sensor chip at its core. Following is its quick features and specifications as supplied by Chinese vendor. Featured By RoboticsBD.
Product Images are shown for illustrative purposes only and may differ from the actual product.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
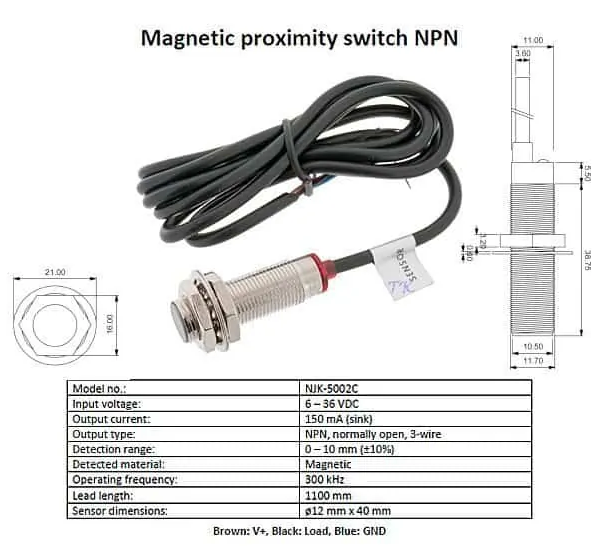
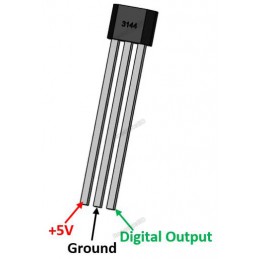
This 3-wire magnetic proximity sensor can be powered from any 6-36V DC power supply (12V typical), and its output – a normally open (N/O) NPN transistor’s collector lead – can drive any resistive/inductive DC load if its operating current is not more than 150mA maximum. The NJK-5002C is configured to work with the south pole (S) of a permanent magnet, located with in 10mm of its vicinity. There’s also one red LED indicator mounted at the rear of the sensor to announce the ‘on’ state (active state) of the device.
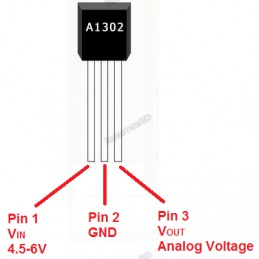
Wire Description:
- VCC : 6 volts to 36 Volts (Brown V+)
- GND : power supply ground (Blue )
- Load (sensor output) : (Black)
Applications:
- Motor shaft speed measurement (shaft encoder)
- Object position detection
- Pulse counter
Features:
- Magnetic Detection Material
- 300kHz Operating Frequency
- 3-wire magnetic proximity sensor
- Normally open (N/O)
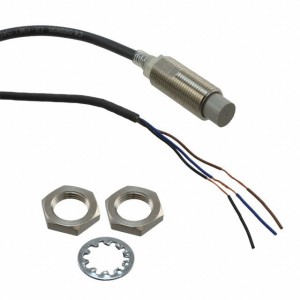
- Product Material Metal parts: Copper plastic components: PBT
- External leads 1.2 m
- Output indication LED (red)
- Form Factor Diameter: 12MM thread length: 32MM Overall Length: 37MM
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
| General Specification |
| Input voltage | 6~36 VDC |
| Output Current | 150mA (sink) |
| Output type | NPN, normally open, 3-wire |
| Detection range | 0-10mm (+- 10%) |
| Detected material | Magnetic |
| Operationg Frequency | 300kHz |
| Lead length | 1100mm |
| Sensor dimensions: | 12mm x 40mm |
| Shipment Weight | 0.039 kg |
| Shipment Dimensions | 18 × 18 × 6 cm |
Please allow 5% measuring deviation due to manual measurement.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
Documentation:
- Basic Operating Principle of an Inductive Proximity Sensor
- Arduino Tachometer
- The NJK-5002C Hall-Effect Sensor Proximity Switch
Package Includes:
1 x NJK-5002C Hall Effect Proximity Sensor.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD