Banner






If you're looking for a base for your next robot, look no further than the Rover 5. The Rover 5 uses 2 independent motors, each with an optical quadrature encoder and gearbox. The entire gearbox assembly can be rotated at 5 degree increments for different clearance configurations. You can even replace the tank treads with traditional wheels. RoboticsBD
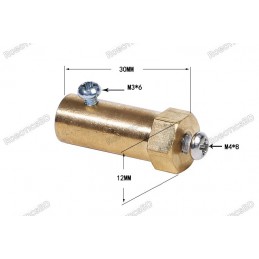
This isn't a wimpy or flimsy robot base. Weighing in at over 2.5 pounds without batteries, this base is heavy duty and can drive over quite a bit. Check the manual below for dimensional drawings.
Each gearbox has an 87:1 ratio includes a hall effect quadrature encoder that gives 1000 pulses over 3 revolutions of the output shaft. The chassis can be upgraded to include two motors and encoders making it ideal for mecanum wheels. RoboticsBD
Inside of the chassis are 2 noise suppression coils at the bottom and a battery holder that accepts 6x AA batteries. It is recommended to use NiMh batteries as they last longer and have a higher current output than Alkaline batteries. Featured By RoboticsBD.
Product Images are shown for illustrative purposes only and may differ from the actual product.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
A quadrature encoder, also known as an incremental rotary encoder measures the speed and direction of a rotating shaft. Quadrature encoders can use different types of sensors, optical and hall effect are both commonly used. There are two hall effect sensors on the PCB that respond to an 8-pole disc magnet mounted on one of the gears . No matter what type of sensors are used the output is typically two square waveforms 90° out of phase.
If you only wish to monitor the speed of rotation then you can use either output and simply measure the frequency. The reason for having two outputs is that you can also determine the direction of shaft rotation by looking at the pattern of binary numbers generated by the two outputs
By feeding both outputs into an XOR gate (exclusive OR) you will get a square wave with twice the frequency regardless of direction. This can be useful as it allows one interrupt pin to monitor both encoder inputs. RoboticsBD
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
| General Specification | |
| Motor rated voltage: | 7.2V |
| Motor stall current: | 2.5A |
| Output shaft stall torque: | 10Kg/cm |
| Gearbox ratio: | 86.8:1 |
| Encoder type: | Quadrature |
| Encoder resolution: | 1000 state changes per 3 wheel rotations |
| Speed: | 1Km/hr |
| Shipment Weight | 1.05 kg |
| Shipment Dimensions | 24.5x22.5x6 |
Please allow 5% measuring deviation due to manual measurement.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
1 x Rover 5 Robot Platform 2 Motors 2 Encoders.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD

Specific References
Your review appreciation cannot be sent
Report comment
Report sent
Your report cannot be sent
Write your review
Review sent
Your review cannot be sent
Reference: RBD-1709
Reference: RBD-1254
Reference: RBD-1707
Reference: RBD-3704
Reference: RBD-0880
Reference: RBD-0918
Reference: RBD-0750
Reference: RBD-0882
Reference: RBD-2264
Reference: RBD-0878
Reference: RBD-1894
We'll slide into your inbox when the product is back in stock.
Reference: RBD-0749
Reference: RBD-1301
Reference: RBD-0140
We'll slide into your inbox when the product is back in stock.
Reference: RBD-2258
Reference: RBD-2265
Reference: RBD-0307
Reference: RBD-0376
Reference: RBD-0652
Reference: RBD-0022
Reference: RBD-0094
Reference: RBD-0406
Reference: RBD-0732
Reference: RBD-0765
Reference: RBD-0796
Reference: RBD-0580
Reference: RBD-0259
Reference: RBD-0326
Reference: RBD-0581
Reference: RBD-1301
Reference: RBD-0360
We'll slide into your inbox when the product is back in stock.
Reference: RBD-0176
Brand: SparkFun Electronics
Reference: RBD-1601
Reference: RBD-1650
Reference: RBD-1264
check_circle
check_circle