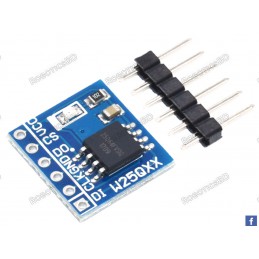
The TJA1050 CAN Bus Transceiver Module is a robust and efficient communication interface designed for seamless connection between microcontrollers and CAN (Controller Area Network) systems. Built around the high-performance TJA1050 IC, it supports communication speeds of up to 1 Mbps, ensuring fast and stable data transfer. With excellent electromagnetic compatibility, low emissions, and built-in protection against short circuits, this module is ideal for demanding environments. Its compact design with both screw terminals and pin headers makes integration straightforward for developers. Perfect for automotive electronics, industrial control, robotics, and embedded systems, this module offers a cost-effective solution for building and testing reliable CAN-based applications. Featured By RoboticsBD.
Product Images are shown for illustrative purposes only and may differ from the actual product.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
Features:
Based on the TJA1050 CAN transceiver IC for stable performance.
Supports data rates up to 1 Mbps for fast communication.
Provides an interface between CAN protocol controllers (Arduino, STM32, etc.) and physical CAN bus.
Excellent EMC performance with low electromagnetic emissions.
Built-in short-circuit protection to supply and ground.
Compact PCB with screw terminals and pin headers for flexible wiring.
Wide application use in automotive, robotics, and industrial automation.
Cost-effective and reliable for testing, learning, or production use.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
Applications:
Automotive electronics for in-vehicle communication systems.
Industrial automation for real-time machine and process control.
Robotics for distributed control and sensor communication.
Embedded systems needing robust CAN bus connectivity.
Learning and testing CAN protocol communication.
IoT and smart devices requiring CAN-based networks.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
| General Specifications |
| IC Model | TJA1050 CAN Bus Transceiver |
| Communication Speed | Up to 1 Mbps |
| Interface | CAN protocol controller ↔ physical CAN bus |
| Protection Features | Short-circuit to power and ground |
| EMC Performance | Excellent, low emissions |
| Connection Options | Screw terminals, pin headers |
| Compatibility | Arduino, STM32, ESP32, and other MCUs |
| Applications | Automotive, robotics, industrial, embedded |
| Shipment Weight | 0.010 kg |
| Shipment Dimensions | 4 × 3 × 3 cm |
Please allow 5% measuring deviation due to manual measurement.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
Documentation:
KEY FEATURES OF TJA1050 CAN BUS TRANSCEIVER MODULE:
- Up to 1Mb/s bus speed
- Up to 1000 meter bus length
- 5V Operation
CAN stands for Controller Area Network and it is often thought of as primarily an automotive communication bus since it is the standard for use with automobiles to connect all the electronics and sensors together and is brought out to the outside world via the ODB-II interface.
The CAN bus is in fact a good communication bus for many applications that use multiple distributed MCUs which need to interact with each other such as in factory automation or robotics.
The key features of the CAN bus is that it uses only 2 wires for bus communications and all MCUs connect to these same 2 wires.
This module is mainly handy for providing the interface for connecting a built-in CAN bus controller as found in some of the more advanced MCUs, to the physical differential bus lines that connect the different MCUs on the bus.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
CAN Bus Hardware Connections
The physical bus consists of two end nodes which sit at the two ends of the bus. A cable of twisted pair wire which is usually shielded connect the two nodes. For bench-top type use, any 2 wires will work to connect the nodes. As the bus length increases or the environmental electrical noise increases, using twisted pair and adding shielding becomes more important.
The end nodes have a 120 ohm resistor that terminate the two ends of the bus. Each of these modules have a built-in 120 ohm resistor at location R3.
Other nodes can be added between the two end nodes. These can be spliced in-line or attached to the main bus using a short stub cable as long as the length is kept under 12″. These additional nodes do not use a 120 ohm termination resistor and so the resistor on the module should be removed from these additional nodes.
MCP2515 Wire Diagram

Typical CAN Bus Arrangement
These modules have zero ohm resistors in series with the CANH/CANL bus lines that can be optionally use to add series resistance. The module also has 2 small capacitors of approximately 30pF capacitance on these lines.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
Module Connections
Since this module operates at 5V, if connecting to a 3.3V MCU a logic level translator will need to be used on the RX line going to the MCU. Using one on the TX line is optional.
The module has the Select pin of the TJA1050 tied to ground which puts the transceiver into the high-speed mode which is the normal mode of operation.
The main MCU CAN controller connection is via a 4-pin male header. The physical CAN bus is connected via a 2-pin male header. The headers are shipped separately so these connections can be wired instead of using headers if desired. The module will also fit the small 2.54mm screw terminals, but the terminal block will hang off the end of the board.
1 x 4 Header
- VCC = 5V power
- TX= Transmit data input. Reads in data from CAN controller and sends to bus lines
- RX= Receive data output. Reads out data from bus lines to the CAN controller
- GND= Ground, connects to MCU ground.
1 x 2 Header
- CANH = CAN Bus H connection. CANH connects to CANH on other modules
- CANL = CAN Bus L connection. CANL connects to CANL on other modules
The module has 2 small M2 holes for mounting.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
OUR EVALUATION RESULTS:
The CAN Bus is an underutilized bus and well worth exploring in the context of a distributed MCU system as it allows more of the system architecture to be moved to the software side of the equation which increases flexibility. You don’t see cars having to have their CAN bus rewired every time some module is changed to add or remove a feature. It is also very robust in order to survive the harsh automotive environment.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
TECHNICAL SPECIFICATIONS
| Operating Ratings | | |
| Vcc | Range | 4.75 to 5.25V |
| Temperature | Range | -40 to 150°C |
| Icc | Typical recessive current | 5mA |
| Typical dominant current | 50mA |
| Dimensions | L x W (PCB) | 22 x 11mm (0.87 x 0.43″) |
| Country of Origin | | China |
| Datasheets | NXP / Phlips | TJA1050 |
Package Includes:
1 x TJA1050 CAN Bus Transceiver Module
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD