The Stepper Motor NEMA-17 1.2A KS42STH40-1204A is a precision-engineered motor designed for applications that demand accurate motion control, such as 3D printers, CNC machines, and automation projects. Featuring a 1.8° step angle with 200 steps per revolution, it ensures smooth and reliable performance. With a 4-wire bipolar configuration, it works seamlessly with stepper motor drivers like A4988 or DRV8825, enabling features such as microstepping for higher precision. The motor operates at 2V with a phase current of 1.2A, while its robust construction delivers a minimum holding torque of 4N.m, making it suitable for heavy-duty applications. Its compact 42×42×40mm frame and 5mm shaft diameter make it a standard fit for NEMA17 mounts. This stepper motor is durable, efficient, and ideal for both hobbyists and professional engineering projects. Featured By RoboticsBD.
Product Images are shown for illustrative purposes only and may differ from the actual product.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
Features:
Precision Motion Control – 1.8° step angle with 200 steps per revolution.
High Torque Output – Provides at least 4N.m holding torque for stability.
Standard NEMA-17 Size – 42×42×40mm compact design ensures wide compatibility.
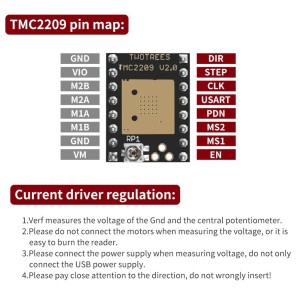
Bipolar 4-Wire Design – Compatible with popular drivers (A4988, DRV8825, TMC series).
Microstepping Support – Achieve up to 6400 micro-steps per revolution for extreme accuracy.
Reliable & Durable Build – High-quality construction ensures long service life.
Versatile Applications – Suitable for robotics, automation, CNC machines, and 3D printers.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
Applications:
3D Printers – Ensures accurate positioning for smooth layer printing.
CNC Machines – Provides reliable step control for milling, cutting, and engraving.
Robotics Projects – Ideal for robotic arms, mobile robots, and automation.
DIY Electronics – Great choice for hobbyists building custom motion systems.
Automation Systems – Perfect for conveyor belts, sliders, and linear actuators.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
| General Specifications |
| Model | KS42STH40-1204A |
| Motor Type | Stepper Motor NEMA-17 |
| Step Angle | 1.8° |
| Steps per Revolution | 200 |
| Voltage Rating | 2V |
| Phase Current | 1.2A |
| Phase Resistance | 1.7Ω |
| Holding Torque | 4N.m (minimum) |
| Shaft Diameter | 5mm |
| Motor Dimensions | 42×42×40mm |
| Motor Weight | 290g |
| Wiring | 4-wire bipolar |
| Shipment Weight | 0.2943 kg |
| Shipment Dimensions | 9 × 7 × 5 cm |
Please allow 5% measuring deviation due to manual measurement.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
Documentation:
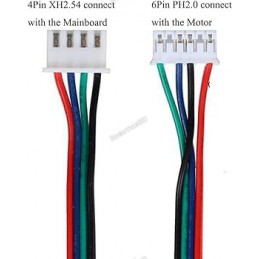
Motor Connections:
These are bipolar stepper motors with 4 wires. Direction of rotation is expressed as you are looking at the output shaft. Positive commands turn the motor clockwise. If the motor is rotating in the opposite direction than you intended, simply swap the leads to one coil only.
Cable colors may vary. When looking at the connector on the motor, it is 6 pin, but only 4 of the pins are used. Pins 1 & 3 are for one coil and pins 4 & 6 are the other coil.

RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
OUR EVALUATION RESULTS:
These stepper motors are well made, have good torque and are very smooth in operation. They work great with our DRV8825 Stepper Motor Driver down below. We also have an optional steel bracket which is painted black that can be used for mounting the motor for some applications if you are building something from scratch.
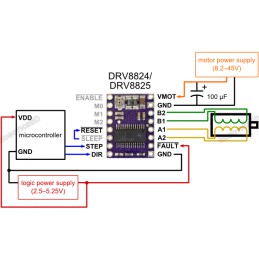
The example software below uses the DRV8825 to drive this servo motor to show the basic mechanics of making one of these things go. More information can be found on the DRV8825 page linked down below.DRV8825 Driver Minimal Setup Schematic
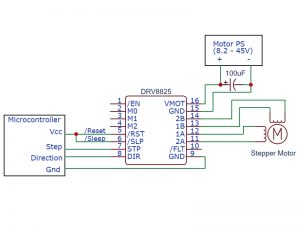
When using with an Arduino, the BasicStepperDriver.h library can be downloaded from GitHub which provides control for the DRV8825 and similar stepper drivers and is used in our program below.
The program is a simple test program. It uses the driver module in the minimal hardware mode using just the DIR and STEP pins with the micro-stepping set to the default of full step as shown in the drawing to the right.
It moves the stepper in one direction for 5 rotations, rotates in the reverse direction for 1 rotation and then rotates for one rotation in discrete individual full steps. Ensure that the RST and SLP pins are pulled up to Vcc on the Arduino. Also ensure that the current limiting has been adjusted for the motor you are using.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
Stepper Motor KS42STH40-1204A / DRV8825 Test Program
/*
* Exercise the DRV8825 Stepper Motor Driver Module
*
* This uses the minimal setup configuraiton with DIR connected to pin 8 and
* STEP connected to pin 9.
*
* The /Reset and /Sleep pins need to be pulled up to VCC
* Step size is left at default of Full Step
* This uses the BasicStepperDriver.h library which can be downloaded at GitHub
*/
#include <Arduino.h>
#include "BasicStepperDriver.h"
// Motor steps per revolution. Most steppers are 200 steps or 1.8 degrees/step
const int MOTOR_STEPS = 200;
// Set speed of rotation
const int RPM = 120;
// Using default step size. 1=full step, 2=half step, etc.
const int MICROSTEPS = 1;
// Define Arduino pins usedUses default full step
const int DIR_PIN = 8;
const int STEP_PIN = 9;
// Create stepper object in 2-wire basic configuration.
BasicStepperDriver stepper(MOTOR_STEPS, DIR_PIN, STEP_PIN);
//===============================================================================
// Initialization
//===============================================================================
void setup() {
stepper.begin(RPM, MICROSTEPS); // Uses default full step mode
}
//===============================================================================
// Main
//===============================================================================
void loop() {
int i;
for(i=0; i<5; i++) stepper.rotate(360); // 360 = degrees rotation
stepper.rotate(-360); // Rotate once in opposite direction
for(i=0; i<200; i++){ // Rotate 1 step at a time, pause between steps
stepper.move(1 * MICROSTEPS); // Steps are full steps
delay(25);
}
delay(1000);
}RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
Package Includes:
1 x Stepper Motor NEMA-17 1.2A KS42STH40-1204A
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD