The stepper motors move in precisely repeatable steps, hence they are the motors of choice for the machines requiring precise position control. The Nema17 4.2 kg-cm Stepper motor can provide 4.2 kg-cm of torque at 1.7A current per phase.
The motor’s position can be commanded to move or hold in one position with the help of Stepper Motor Drivers. The Nema17 4.2 kg-cm Stepper motor provides excellent response to starting, stopping, and reversing pulses from the stepper motor driver.
They are very useful in various applications, especially which demands low speed with high precision. Many machines such as 3D Printers, CNC Router and Mills, Camera Platforms, XYZ Plotters, etc.
A stepper motor to satisfy all your 3D-Printer, robotics, Linear Motion projects needs! This 4-wire bipolar stepper has 1.8° per step for smooth motion and a nice holding torque. The motor was specified to have a max current of 1.7A/phase so that it could be driven easily with common motor shield for Arduino (or other motor driver) and a wall adapter or lead-acid battery. The motors are supplied with a 50cm long power cable with a 4-pin Harwin female connector already fitted – ready to plug and print!
It is a brushless DC motor, so the life of this motor is dependent upon the life of the bearings. The position control is achieved by a simple Open Loop control mechanism so it doesn’t require complex electronic control circuitry.
The motor’s shaft has been machined for good grip with a pulley, drive gear, etc. and especially avoiding stall or slip.
Note :
- The Nema17 4.2 kg-cm Stepper motor dimensions and weight may have a ±2% error.
- Resonances can occur because of improper mounting.
- Not easy to operate at extremely high speeds.
Featured By RoboticsBD.
Product Images are shown for illustrative purposes only and may differ from the actual product.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
Features :
- The input pulse decides the rotation angle of the motor.
- High accuracy of around 3 to 5% a step.
- It provides good starting, stopping, and reversing.
- Control of this motor is less costly because of the exclusion of complex control circuitry.
- The speed is proportional to the frequency of the input pulses.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
| General Specification |
| Step Angle | 1.8° |
| Holding Torque (Kg-Cm) | 4.2 |
| Operating Voltage (VDC) | 12 ~ 24 |
| Supply Current (A) | 1.7 A /Phase. |
| No. of Leads | 4 |
| Inductance (mH/Phase) | 3.2 |
| Resistance (Ω) | 1.65 |
| Frame Size (mm) | 42 x 42 |
| Dimensions (mm) LxWxH | 40x42x42 |
| Shaft Type | Round |
| Shaft Length (mm) | 21 |
| Shaft Diameter (mm) | 5 |
| Inductance Accuracy | ±20% |
| Resistance Accuracy | ±10% |
| Step Angle Accuracy | ±5% |
| Rotor Inertia (gm-cm2) | 54 |
| Weight (gm) | 288 |
| Cable Length (cm) | 25 |
| Shipment Weight | 0.375 kg |
| Shipment Dimensions | 5 × 4 × 1 cm |
Please allow 5% measuring deviation due to manual measurement.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
Documentation:
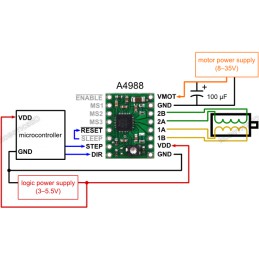
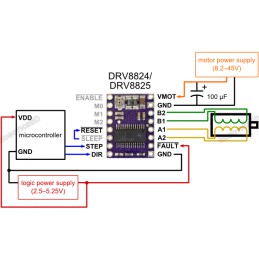
- Arduino and Stepper Motor Configurations
- Stepper Motor Basics
Package Includes :
1 x Nema17 4.2 kg-cm stepper motor.
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD
RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD RoboticsBD